Surgical planning and assistance
Under creation, Please refer to the projects page
Description
With the recent progress in Artificial Intelligence and robotics, it is now possible to consider that surgery can be made easier by automation of parts of the whole process. The aim of surgical planning and assistance axe is to study how far we can go with automation in decision and action in surgery, to study the technical feasibility, identify the limitations and study human acceptability. Automation in surgery may cover the different stages from surgical strategy selection to surgery performance. We will address automation in surgery by means of surgical data science methodology expressed as a situation awareness problem.
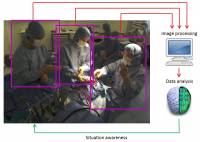
We aim at studying a new paradigm in automation in surgery by making the system aware about the environment. This computer assisted situation awareness (SA) will be given following a “surgical data science” approach, where the situation is learned automatically from sensor analysis in combination with models. We envisage computer assisted SA as an automation system for safe, smooth, transparent and intelligent assistance of teamwork. Situation awareness is defined as “the perception of elements in the environment within a volume of time and space, the comprehension of their meaning, and the projection of their status in the near future.” 1) We define the environment as the elements involved in the surgical procedure. This obviously includes the patient, where most of the research has been naturally focused on, but also the surgeon and the surgical team. We believe that situation awareness (SA) regarding to the humans involved in the process is crucial and we already started addressing this aspect in our previous research. As defined above, SA requires three components. This project will address all three.
Current Projects
Surgical Data Science for Deep Brain Stimulation
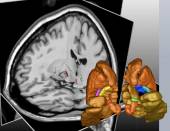
| High frequency and continuous electrical stimulation of deep brain structures (DBS) has been demonstrated as an efficient minimally invasive surgical treatment for treating motor related diseases and recently severe neuropsychological diseases. The quality of the clinical improvement, as well as the existence of motor, neuropsychological or psychiatric side effects strongly depend on the location of the electrodes. To improve targeting and post operative evaluation for better outcome and reduced side effects, we studied and implemented an approach based on numeric and symbolic models for helping decision making process in deep brain stimulation surgery. More information |
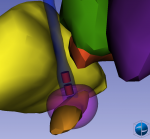 |
High frequency and continuous electrical stimulation of deep brain structures (DBS) has been demonstrated as an efficient minimally invasive surgical treatment for treating motor related diseases and recently severe neuropsychological diseases. The quality of the clinical improvement, as well as the existence of motor, neuropsychological or psychiatric side effects strongly depend on the location of the electrodes. To improve targeting and post operative evaluation for better outcome and reduced side effects, we studied and implemented an approach based on numeric and symbolic models for helping decision making process in deep brain stimulation surgery. More information
Acroboat: Analysis of Robotic Surgery
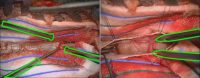
| The goal of this project is to understand differences in outcomes between patients in the case of robotic-assisted hysterectomy. We aim to outline factors that may explain such differences by collecting data about the patient, the surgeon, and the performed surgical procedure (video and kinematic data). These data will allow us to quantify the surgeon’s expertise and study the impact on the outcome. More information |
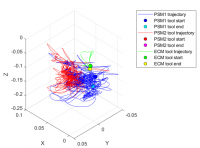 |
The goal of this project is to understand differences in outcomes between patients in the case of robotic-assisted hysterectomy. We aim to outline factors that may explain such differences by collecting data about the patient, the surgeon, and the performed surgical procedure (video and kinematic data). These data will allow us to quantify the surgeon’s expertise and study the impact on the outcome. More information
CASRAA: Context Awareness and Surgical Process Model for Robotic Assisted Arthroplasty
Computer-assisted systems cover multiple surgical domains, and arthroplasty is not an exception. In this project, in collaboration with Stryker, we aim to enhance surgical efficiency by providing to each member of the surgical team personalized and context-specific support and information according to their experience. The final objective is to provide relevant assistance to accelerate the advancement of collaborative proficiency. More information |
 |
Computer-assisted systems cover multiple surgical domains, and arthroplasty is not an exception. In this project, in collaboration with Stryker, we aim to enhance surgical efficiency by providing to each member of the surgical team personalized and context-specific support and information according to their experience. The final objective is to provide relevant assistance to accelerate the advancement of collaborative proficiency. More information
Development of a Semantic database for the MEDIRAD Image and Radiation Dose BioBank
| This work addresses the development of a computer system called Image and Radiation Dose BioBank (IRDBB) designed to manage image and dosimetric data in an integrated way. This development is exemplary of the strategy promoted by our team for implementing imaging biobanks in the future. Our contribution to the development of the IRDBB system concerns the development of a semantic database implemented as a Resource Description Framework (RDF) graph aligned onto an application ontology called OntoMEDIRAD, that specifies the semantics of any information within this database. More information |
 |
Knowledge-based multi-level modelling and recognition of Surgical Processes
| Surgical context-aware system (CAS) is a foundation stone of operating room of the future allowing the improvement of the patient care, as well as the assistance to the surgical team in order to prevent medical erros and facilitate clinical routine. CAS requires an accurate recognition of the surgical workflow and the detection of events having place in the OR. The surgical workflow can be examined in different levels of granularity (e.g. phases, steps or actions). The existing methods for surgical workflow detection rarely associate input data with the underlying semantics and often focus on one granularity level only. The goal of this project is to implicate the formalized knowledge in the detection process and to perform a multi-level analysis of surgical procedures to enable various clinical applications. More information |
 |
OntoSPM an ontology of surgical process modeling
| Many application contexts in surgery necessitate to define knowledge models of surgical processes, e.g. decision support systems, context-aware systems, … A key feature of such knowledge models is to rely on a standard vocabulary modeling the various entities and relations involved in the domain of interest. OntoSPM is an ontology developed to provide a generic vocabulary of the domain of surgical procedures, focusing on entities such as surgical procedure steps, surgical actions, actors, instruments and roles. More information |
 |
Former Projects
Analysis of surgical procedures by Surgical Process Modelling
The concept of surgical process models (SPM), we introduced about 20 years ago, is now emerging as a key element of the operating room of the future, assuming that an optimal surgical support system needs to be adapted to the different surgical times with an explicit understanding of the surgical process (named situation awareness). Surgical process models are descriptions of the surgical or interventional procedure formalized and represented into structured forms. The main contribution of this project was the development of a software for observer-based descriptions of individual surgical procedures from live observations or from video, resulting in individual SPMs. More information |
 |
ImPACT: Technical and Procedural Surgical Skill Analysis (TPSSA)
| The TPSSA project aims at studying technical and procedural surgical skills from observations of simulated surgical procedures. From this, first, invariants aspects will be further analyzed to identify tasks that can be easily automated by a robotic system. Such tasks should correspond to non-critical tasks where automation could decrease surgical time and increase reproducibility. Second, variations between surgeons related to expertise will lead to further analysis to identify tasks requiring specific assistance. Such analysis will cover both technical and procedural aspects of surgical skills. More information |
 |
Microscope image analysis for automatic phases recognition in surgery
The need for a better integration of the new generation of Computer-Assisted-Surgical (CAS) systems has been emphasized. One necessity to achieve this objective is to retrieve data from the Operating Room (OR) with different sensors, then to derive models from these data. The use of videos from cameras in the OR has demonstrated its efficiency. In this project, we propose a machine learning framework to assist in the development of systems for the automatic recognition of high-level surgical tasks using microscope videos analysis. More information |
 |
Model based computer assisted surgery for Deep Brain Stimulation
| High frequency and continuous electrical stimulation of deep brain structures (DBS) has been demonstrated as an efficient minimally invasive surgical treatment for treating motor related diseases and recently severe neuropsychological diseases. The quality of the clinical improvement, as well as the existence of motor, neuropsychological or psychiatric side effects strongly depend on the location of the electrodes. To improve targeting and post operative evaluation for better outcome and reduced side effects, we studied and implemented an approach based on numeric and symbolic models for helping decision making process in deep brain stimulation surgery. More information |
 |
Navigated Intraoperative Functional Imaging for Brain tumor Surgery Optimization
| Survival prognosis from low grade glioma (LGG) is increased when the maximum tumoral tissue has been removed. Intraoperative Positron Surface Imaging (PSI) has been suggested recently in neurosurgery to help the surgeon in detecting precise tumor margins. The main objective of this project is to perform the feasibility study of using PSI in the context of neurosurgery and especially the impact of detection model on image quality. A second objective is to develop new acquisition models for PSI systems, dedicated to brain tumor surgery. More information |
 |
Semantic annotation in neuroimaging
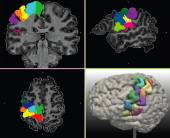
| The general objective is to produce image annotations that enable to associate explicit semantics to anatomical features extracted from anatomical MRI images and Diffusion MRI images. Such features can be regions of interest (ROI) representing anatomical structures such as gyri or gyri parts, as well as fiber bundles extracted from Diffusion MRI images, using deterministic or probabilistic tractography methods. The annotations refer to ontologies, that provide a reference terminology and represent the common properties of the referred entities. More information |
 |
Surgical Tool Detection
| Detecting tools in surgical videos is an important indregient for context-aware computer-assisted intervention systems. We propose a new two-stage pipeline for tool detection and pose estimation in 2d images, named ShapeDetector. More information |
 |
Older Projects
Image Guided NeuroSurgery
| These works aim at assisting the surgeon in the operation by using preoperative and intra-operative images of the patient. The main purpose of this job is to initiate the development of a complete image-guided-neurosurgery software platform which can be setup in the surgery room and readily used autonomously by the medical staff. More information |
 |
NeuroLOG project (2007-2010)
|
The NeuroLOG project was developed based on the results of the NeuroBase Concerted Action (Action Concertée Incitative). This NeuroBase ACI was a Proof of Concept demonstrating the relevance and feasibility of federated systems for sharing imaging data in neuroimaging. During the NeuroLog project a distributed platform was set up to support multi-centric studies in neurosciences. The platform was deployed over 5 neuroscience centers spread all over France (Grenoble, Nice, Paris, Rennes). It enabled neurodata stores federation, neurodata analysis pipelines description and delivered grid computing capability to support data-intensive experiments in a secured environment. The NeuroLOG middleware is non-intrusive, since it interfaces the legacy neurodatabases available at each center participating in the federation thanks to a mediator called “Data federator” provided by the Business Objects company. The federation of the databases relies on a common ontology called OntoNeuroLog developed during the project, used to align the heterogeneous data present in the different databases onto a common schema. The main modules of OntoNeuroLog are available at the National Center of Biomedical Ontology (NCBO) Bioportal:
More information
|
 |
Shanoir project (2007-2011)
| The Shanoir project was initiated by IRISA during the NeuroLOG project. It aims at designing a repository supporting the storage of neuroimaging data. The Shanoir system involves a relational database whose schema is aligned on the OntoNeuroLog ontology. The system has been continuously developed by IRISA since 2007. It is used in several neuroimaging centers in Grenoble, Rennes (Neurinfo platform) and in the France Life Imaging infrastructure: Information Analysis and Management (IAM) node |
 |
Virtual Imaging Platform (2009-2012)
|
The VIP project aimed at setting up a platform allowing the sharing on the internet of medical image simulation tools, facilitating their use by large communities of researchers, and offering a grid-based computation environment. This platform implemented several simulation packages dedicated to various medical imaging modalities (CT, MR, PET, US), namely SIMBAD for CT, SIMRI for MR, SORTEO for PET, and FIELD II for US. Our contribution concerned the sharing and reuse of anatomical/physiological models that can be used to create simulated images. An ontology (called OntoVIP) was designed to model the vocabulary used to describe such models. It reused significant parts of the OntoNeuroLOG ontology, as well as other ontologies, namely: FMA (Foundational Model of Anatomy), PATO (Ontology of phenotypic traits), MPATH (Mouse pathology), RadLex (Lexicon of radiology) and ChEBI (chemical entities of biological interest).
The OntoVIP ontology is available at the National Center of Biomedical Ontology (NCBO) Bioportal: OntoVIP ontology
More information
|
 |
